crwdns2935425:011crwdne2935425:0
crwdns2931653:011crwdne2931653:0

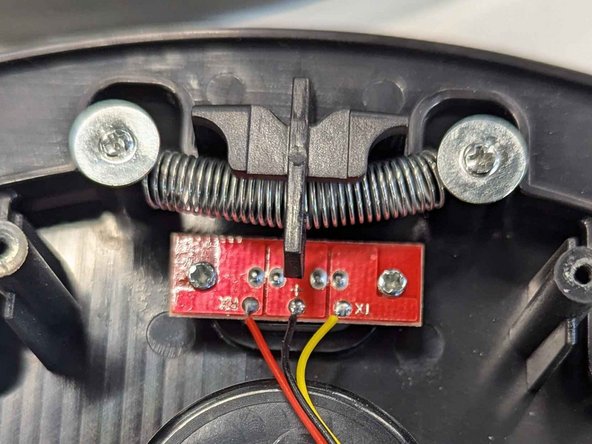


Removing the IR Sensors
-
Using a small Phillips screwdriver, remove the 2 screws that hold the IR sensor PCB to the robot.
-
Placing your fingers on the side to avoid damaging the PCB, lift away from the robot.
-
Once the PCB has been removed, lift out the plastic covers for the IR sensor from the robot.
-
Repeat for the other 2 IR sensors. Note, the sensor at the front is only accessible once the main PCB has been removed, hence why it was avoided until now.
crwdns2944171:0crwdnd2944171:0crwdnd2944171:0crwdnd2944171:0crwdne2944171:0