crwdns2935425:03crwdne2935425:0
crwdns2931653:03crwdne2931653:0


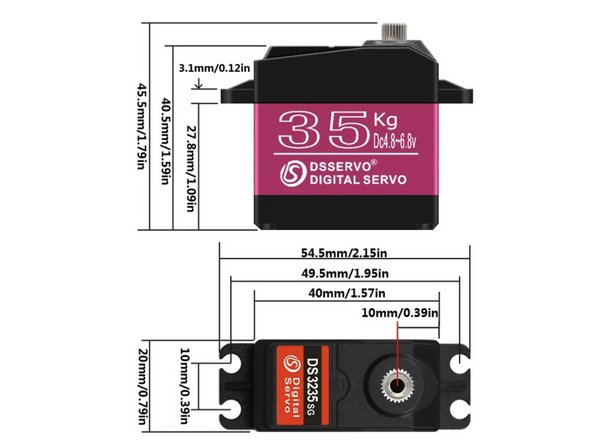



Solder the new servo and mount it
-
With the Arduino code you can test the alignement. There is a alignment mark on the bot itself.
-
The Servo can do 180 degrees, the robot needs around 120, so there is margin from the servo but NOT from the mechanics.
-
If the jet mechanic is at the stop and the servo want to go further, it will end with a loss. IMHO you can dare it by just by hand.
crwdns2944171:0crwdnd2944171:0crwdnd2944171:0crwdnd2944171:0crwdne2944171:0